Se messe in condizione di dialogare tra di loro, le automobili saranno sempre più intelligenti e presto non avranno più bisogno di noi al volante. Già adesso i veicoli tra loro connessi – che nel gergo ingegneristico costituiscono un Sistema Cooperativo (Cooperative Systems) – sono in grado di avvertire in tempo reale i loro conducenti della presenza di lavori in corso non segnalati, di un veicolo lento nelle vicinanze, della possibilità di una collisione a un incrocio, della presenza di un incidente fuori dal campo visivo del conducente, del rischio di aquaplaning in una curva, dei limiti di velocità (aggiornati dinamicamente) da rispettare in un determinato tratto di strada. Rispetto a quanto già oggi disponibile nelle vetture di fascia alta di nuova generazione i Sistemi Cooperativi permettono di estendere l’orizzonte elettronico del veicolo permettendo di “vedere” in tempo reale quello che gli altri veicoli e la strada stessa (“la smart road”) vedono attraverso i loro sensori: in questo senso, i Sistemi Cooperativi beneficiano dell’Internet delle Cose e ne fanno essi stessi parte, realizzando la rivoluzione tecnologica alla base dell’era digitale.
A questo tipo di innovazione guarda con attenzione fin dal 2007 la stessa Commissione europea, finanziando progetti di ricerca sulla connettività e sull’automazione veicolare e sostenendo lo sviluppo della necessaria infrastruttura digitale stradale nonché la creazione di centri di controllo remoti. Al fine di evitare privative di mercato e poter quindi garantire l’interoperabilità fra le soluzioni tecnologiche sviluppate dalle diverse industrie di settore, Bruxelles si è concentrata sui processi di standardizzazione e nell’ottobre 2009 ha chiesto allo European Telecommunications Standards Institute (ETSI) e allo European Committee for Standardization (CEN) di mettere a punto regole tecniche condivise. Dopo cinque anni di lavoro sono stati così pubblicati 50 standard fra norme e specifiche tecniche che costituiscono i requisiti minimi per la realizzazione dei Sistemi Cooperativi su scala europea e in un contesto trans-frontaliero. Nell’ambito delle campagne di sperimentazione (Plugtests™) per la verifica tanto della correttezza di tali standard quanto della inter-operabilità dei sistemi pre-commerciali, ETSI ha individuato nel 2016 il porto di Livorno quale sede europea per la verifica delle comunicazioni fra i veicoli connessi e l’infrastruttura digitale. Un riconoscimento implicito all’importanza dello scalo labronico, che da sempre registra valori record nel Mediterraneo sia per il settore dell’auto nuove sia per il traffico rotabile. Coordinata sul campo dal CNIT (Consorzio Nazionale Interuniversitario per le Telecomunicazioni) e supportata dall’Authority portuale e dalla Regione Toscana, tale sperimentazione è durata due settimane e ha segnato importanti prospettive nel campo della logistica e del trasporto multimodale. Al percorso di prova davanti alla Stazione marittima e sulla superstrada Firenze-Pisa-Livorno hanno infatti partecipato 25 aziende da Stati Uniti, Europa ed Asia (con una media di 60 ingegneri impegnati sul campo).
Forte anche di questo successo, nello scorso novembre la Commissione europea ha così richiesto agli Stati membri dell’Unione la messa in esercizio entro il 2019 delle funzioni mirate all’aumento della sicurezza stradale attraverso i Sistemi Cooperativi. Il punto chiave consiste nella realizzazione di una infrastruttura digitale abilitante che supporti il veicolo connesso nelle sue funzioni orientate all’aumento della sicurezza. Per quanto riguarda il nostro Paese, lo scorso anno ANAS ha lanciato un piano di investimenti mirato all’aggiornamento di tutta la rete stradale e autostradale di sua competenza (estesa 3000 km) che ricomprenda anche il supporto delle diverse funzioni previste dai Sistemi Cooperativi.
Il Ministero dei Trasporti ‘sale’ sul veicolo autonomo
Con il decreto sulle “Smart Road” pubblicato lo scorso 18 aprile sulla Gazzetta Ufficiale, il Ministero delle Infrastrutture e dei Trasporti ha iniziato a regolamentare il settore aprendo di fatto alla sperimentazione del veicolo autonomo. A parte ovviamente la disponibilità delle funzioni di guida cooperativa ed autonoma che verranno assicurati dai nuovi modelli di autovetture, il decreto indica la rete dei corridoi europei transnazionali (nota come rete TEN-T della quale il porto di Livorno rappresenta un nodo “core”) come ambito di applicazione iniziale per la trasformazione digitale delle infrastrutture stradali. Il proprietario e gestore della strada che può ospitare la sperimentazione sulla guida automatica deve disporre della tecnologia sperimentata a Livorno nel novembre 2016 e consolidata in termini di reti e di piattaforme digitali attraverso il progetto AUTOPILOT, finanziato dalla Commissione Europea ed attualmente in corso.
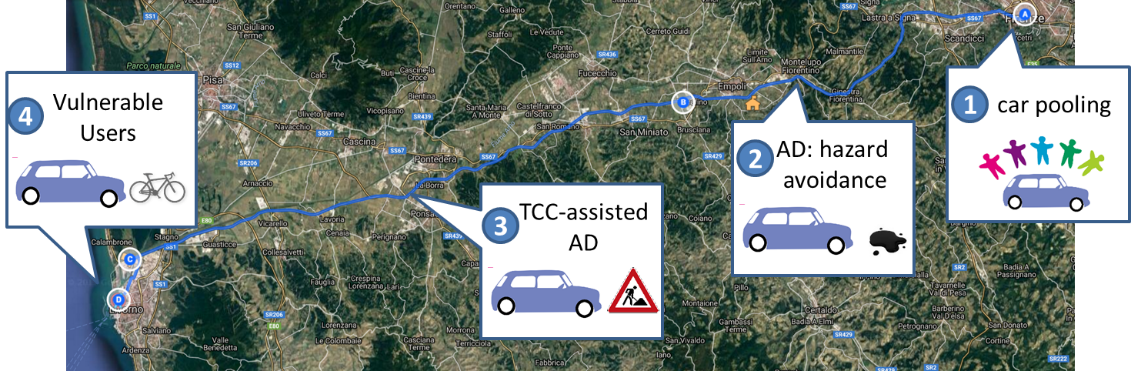
Ancora una volta, nell’ambito di AUTOPILOT, il porto di Livorno e la superstrada Firenze-Pisa-Livorno sono stati così individuati come sito italiano di sperimentazione che si affianca a quelli francese (Versailles), olandese (Helmond), finlandese (Tampere) e spagnolo (Vigo). E se nell’area della Stazione marittima si metterà alla prova la sicurezza di pedoni e ciclisti, sulla superstrada si verificherà il corretto funzionamento dei sistemi di notifica di pericoli incombenti e di lavori in corso. La sperimentazione avrà inizio in giugno e il CNIT e l’Autorità di Sistema Portuale prevedono di allestire già dalla metà di ottobre una serie di iniziative di disseminazione pubblica dei risultati volte a far prendere consapevolezza dell’innovazione tecnologica, sociale e culturale in atto. L’Autorità di Sistema Portuale intende poi consolidare questa azione tecnologica strutturando servizi aperti al cittadino e alle comunità portuali attraverso la sua piattaforma digitale MoniCA, che sta assumendo sempre di più le caratteristiche di un unicum nel panorama dei porti italiani e delle rispettive agende digitali.


